Actions¶
Actions are functions that may be linked to dashboards, sensors, GPIO and other kinds of inputs. Actions are callable from anywhere in your kervi application even if they resides in another process the framework handles process and network boundaries for you.
Define actions¶
You turn a function into an action via the @action decorator
from kervi.actions import action
@action
def my_action(p):
print("my action", p)
You may also decorate methods in kervi controllers:
from kervi.controllers import controller
from kervi.actions import action
class GateController(Controller):
def __init__(self, controller_id="gate_controller", name="Gate controller"):
super().__init__(controller_id, name)
@action()
def open(self, speed):
print("open gate with speed:", speed)
Execute actions¶
You execute an action just as an normal function or method
my_action("p1")
gate_controller = GateController()
gate_controller.open(10)
Actions with timeout
By default, an action is called synchronous and first returns with the result when the action is completed. If you expect your action to operate within a special time interval, you can add the keyword parameter timeout to the action call. If the execution time exceeds the timeout, a TimeoutError exception is raised.
@action
def my_action():
print("started")
time.sleep(10)
print("done")
try:
my_action(timeout=5)
except TimeoutError:
print("Timout occured")
Asynchronous action call¶
It is possible to call an action asynchronously if you don’t want to wait for the action to finish execution. Just set the keyword argument run_async to true.
my_action(run_async=True)
Interrupts¶
Sometimes you need to signal a running action during execution. To handle this situation you need to specify an interrupt function for an action.
terminate = False
@action
def my_action():
print("my_action start")
while not terminate:
time.sleep(.1)
print("my_action done")
@my_action.set_interrupt
def my_action_interrupt():
global terminate
terminate = True
print("interrupt my_action")
#call action
my_action(run_async=True)
#wait for five seconds
time.sleep(5)
#signal that the action should terminate
my_action.interrupt()
Interrupts support parameters
@my_action.set_interrupt
def my_action_interrupt(p1):
global terminate
terminate = True
print("interrupt my_action:", p1)
#call action
my_action(run_async=True)
#wait for five seconds
time.sleep(5)
#signal that the action should terminate
my_action.interrupt("p !")
The action decorator injects a variable “exit_action” that is false until the action is interrupted.
@action
def my_action(p1="p1d", **kwargs):
print("action", p1, kwargs.get("kw1", None))
while not exit_action:
print("in loop")
time.sleep(1)
print("action interrupted")
my_action("p1x", kw1=10, run_async=True)
#wait for five seconds
time.sleep(5)
#signal that the action should terminate
my_action.interrupt()
Scheduling¶
It is possible to schedule when an action should run
@action
def my_action(p1):
print("My action", p1)
my_action.run_every().minute.do("P1")
my_action.run_every(10).minutes.do("P1")
my_action.run_every().minute.at(":17").do("P1")
my_action.run_every().hour.do("P1")
my_action.run_every().day.do("P1")
my_action.run_every().day.at("10:30").do("P1")
my_actionrun_every().monday.do("P1")
my_action.run_every().wednesday.at("13:15").do("P1")
It is also possible to run an action in an time interval.
@action
def my_action(p1="p1d", **kwargs):
print("action", p1, kwargs.get("kw1", None))
while not exit_action:
print("in loop")
time.sleep(1)
print("action interrupted")
my_action.run_every().minute.at(":58").until(":02").do("P!x", kw1=20)
my_action.run_every().wednesday.at("13:15").do("P1")
Linking to dashboards¶
It is possible to link actions to dashboards. A linked action will show up as a button on the panel.
@action
def my_action():
print("this is my action")
my_action.link_to_dashboard("app", "gate")
You can send parameters to the action.
from kervi.actions import action
@action(name="My action")
def my_action(p):
print("my_action is called with:", p)
my_action.link_to_dashboard("app", "gate", action_parameters=["x"])
If an interrupt function is set for the action it will be called when the button is released.
from kervi.actions import action
@action(name="My action")
def my_action(p):
print("my_action is called with:", p)
@my_action.set_interrupt
def my_action_interrupt():
print("my_action interrupt called")
my_action.link_to_dashboard("app", "gate", action_parameters=["x"])
You are able to specify parameters that should be send in the interrupt.
from kervi.actions import action
@action(name="My action")
def my_action(p):
print("my_action is called with:", p)
@my_action.set_interrupt
def my_action_interrupt(p):
print("my_action interrupt called: ", p)
my_action.link_to_dashboard("app", "gate", action_parameters=["x"], interrupt_parameters=["i"])
Other keyword parameters you can use in link_to_dashboard:
link_to_header (
str) – Link this action to the header of the panel.label_icon (
str) – Icon that should be displayed together with label.label (
str) – Label text, default value is the name of the action.flat (
bool) – Flat look and feel.
- inline (
bool) –Display button and label in its actual size If you set inline to true the size parameter is ignored. The action will only occupy as much space as the label and input takes.
on_text (
string) – Text to display when switch is on.off_text (
string) – Text to display when switch is off.on_icon (
string) – Icon to display when switch is on.off_icon (
string) – Icon to display when switch is off.button_icon (
string) – Icon to display on button.button_text (
string) – Text to display on button, default is name.action_parameters (
list) – list of parameters to pass to the action.interrupt_enabled (
bool) – If true the button will send interrupt to action on off. Default true if an interrupt is specified for the action.interrupt_parameters (
list) – List of parameters to pass to the interrupt function of the action.
Linking to values¶
It is possible to link an action to gpio or sensors or other kervi values. When the value of linked source changes the Action is executed or interrupted.
my_action.link_to(GPIO["GPIO2"])
In the code above the action is linked to gpio2 if it goes high it executes the action. When the gpio2 goes low the action is interrupted.
Here is another example where the action is linked to a sensors. When the sensor value is 10 the action is executed.
my_action.link_to(
temp_sensor,
trigger_value = 10
)
You can also use an lambda expression as trigger.
my_action.link_to(
temp_sensor,
trigger_value = lambda x: x > 10
)
If you want to pass the value of the linked source you can do by setting the pass_value parameter Now the action is called every time the source changes.
my_action.link_to(
temp_sensor,
pass_value = true
)
It is also possible to pass additional parameters to the action when it is triggered.
my_action.link_to(
temp_sensor,
trigger_value = lambda x: x > 10,
action_parameters = ["20", 30]
)
You can also specify when the interrupt should fire.
my_action.link_to(
temp_sensor,
trigger_value = lambda x: x > 10,
action_parameters = ["20", 30]
trigger_interrupt_value: lambda x: x < 5,
interrupt_parameters = [0]
)
System actions¶
When the kervi application has loaded and started all processes it calls the app_main action this is your hook where you can start your application logic. In the same way app_exit action is called upon termination of the kervi application.
It is optional for you to define these actions in your application.
@action
def app_main():
#start your application logic here
@action
def app_exit():
#application logic that clean up and reset devices
You can control the application via the following actions
#stop the application
Actions["app.stop"]
#restart the application
Actions["app.restart"]
#shut down application device (Raspberry pi)
Actions["app.shutdown"]
#reboot application device (Raspberry pi)
Actions["app.reboot"]
You can connect a battery sensor to the shutdown action and initiate a shutdown of your device when the battery running low.
from kervi.application import Application
APP = Application()
from kervi.sensors import Sensor
from kervi.devices.sensors.CW2015 import CW2015CapacityDeviceDriver
capacity_sensor = Sensor("CW2015_capacity", "CW2015 capacity", CW2015CapacityDeviceDriver())
#link sensor to action.
APP.actions.shutdown.link_to(capacity_sensor, trigger_value=lambda x: x<10)
#display a battery icon in the header of your application.
capacity_sensor.set_ui_parameter("value_icon", [
{
"range":[0, 5],
"icon":"battery-empty"
},
{
"range":[5, 25],
"icon":"battery-quarter"
},
{
"range":[20, 50],
"icon":"battery-half"
},
{
"range":[5, 75],
"icon":"battery-three-quarters"
},
{
"range":[75, 100],
"icon":"battery-full"
}
])
capacity_sensor.link_to_dashboard("*", "header_right", display_unit=False, show_sparkline=False, show_value=False)
APP.run()
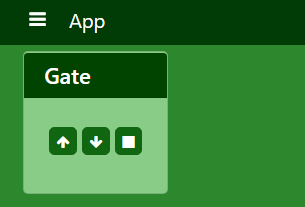
Complete example¶
This is a complete example that shows a gate controller that controls a motor and have two end stop switches. The end stops are linked to GPIO2 and GPIO3.
There are to two actions move_gate and stop_gate these are linked to the “gate” panel on the app dashboard. The move_gate action is also linked GPIO4 and GPIO5. When GPIO4 is triggered the gate opens and closes when gpio5 is triggered.
if __name__ == '__main__':
import time
from kervi.application import Application
APP = Application()
from kervi.dashboards import Dashboard, DashboardPanel
Dashboard(
"app",
"App",
[
DashboardPanel("gate", title="Gate")
],
is_default=True
)
Dashboard(
"settings",
"Settings",
[
DashboardPanel("gate", width="200px", title="Gate")
]
)
from kervi.controllers import Controller
from kervi.actions import action
from kervi.values import NumberValue, BooleanValue
class GateController(Controller):
def __init__(self, controller_id="gate_controller", name="Gate controller"):
super().__init__(controller_id, name)
self.gate_speed = self.inputs.add("speed", "Gate speed", NumberValue)
self.gate_speed.value = 100
self.gate_speed.min = 0
self.gate_speed.persist_value = True
self.lo_end_stop = self.inputs.add("lo_end_stop", "low end stop", BooleanValue)
self.hi_end_stop = self.inputs.add("hi_end_stop", "High end stop", BooleanValue)
self.gate_motor_speed = self.outputs.add("gate_motor_speed", "Gate motor speed", NumberValue)
self._stop_move = False
@action(name="Move gate")
def move_gate(self, open=True):
if open:
print("open gate")
if not self.hi_end_stop.value:
self._stop_move = False
self.gate_motor_speed.value = self.gate_speed.value
while not self._stop_move and not self.hi_end_stop.value:
time.sleep(0.1)
self.gate_motor_speed.value = 0
if self.hi_end_stop.value:
print("Gate open")
else:
print("Gate stopped")
else:
print("close gate:")
if not self.lo_end_stop.value:
self._stop_move = False
self.gate_motor_speed.value = -1 * self.gate_speed.value
while not self._stop_move and not self.lo_end_stop.value:
time.sleep(0.1)
self.gate_motor_speed.value = 0
if self.lo_end_stop.value:
print("Gate closed")
else:
print("Gate stopped")
@move_gate.set_interrupt
def move_gate_interrupt(self):
print("stop gate:")
self._stop_move = True
def controller_start(self):
print("gate controller is started")
self.gate_motor_speed.value = 0
def input_changed(self, changed_input):
pass
gate_controller = GateController()
gate_controller.move_gate.link_to_dashboard("app", "gate", inline=True, button_text=None, button_icon="arrow-up", label=None, action_parameters=[True], )
gate_controller.move_gate.link_to_dashboard("app", "gate", inline=True, button_text=None, button_icon="arrow-down", label=None, action_parameters=[False])
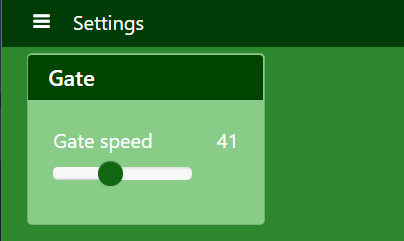
gate_controller.link_to_dashboard("settings", "gate")
from kervi.devices.motors.dummy_motor_driver import DummyMotorBoard
motor_board = DummyMotorBoard()
gate_controller.gate_motor_speed.link_to(motor_board.dc_motors[0].speed)
from kervi.hal import GPIO
GPIO["GPIO2"].define_as_input()
GPIO["GPIO3"].define_as_input()
gate_controller.lo_end_stop.link_to(GPIO["GPIO2"])
gate_controller.hi_end_stop.link_to(GPIO["GPIO3"])
gate_controller.move_gate.link_to(GPIO["GPIO4"], action_parameters = [True])
gate_controller.move_gate.link_to(GPIO["GPIO5"], action_parameters = [False])
APP.run()
The result is an app with two dashboards “app” where the gate is controlled and “settings” where the speed of the gate speed could be set.
Multi process¶
If you want to call an action that is defined in another process within your kervi application you use the Actions list.
from kervi.actions import Actions
Actions["my_action"]("x")
The @action decorator takes the optional parameters action_id. .. code:: python
from kervi.actions import action
@action(action_id=”alternative_id”) def my_action(p):
print(“my action”, p)
You now call it via:
from kervi.actions import Actions
Actions["alternative_id"]("x")
This example shows how to set up at simple robot and control it via an external script of commands.
It consists of two scripts robot.py that should be executed on the robot and a script robot_task.py that holds a series of actions that the robot should perform.
robot.py is a kervi application that you should execute on your Raspberry pi.
if __name__ == '__main__':
from kervi.application import Application
APP = Application()
from kervi.controllers.steering import MotorSteering
from kervi.devices.motors.dummy_motor_driver import DummyMotorBoard
motor_board = DummyMotorBoard()
#MotorSteering is a build controller for handling robots with two motors.
steering = MotorSteering()
steering.left_speed.link_to(motor_board.dc_motors[0])
steering.right_speed.link_to(motor_board.dc_motors[1])
@action
def app_exit():
steering.stop()
APP.run()
The other python script robot_tasks.py is a kervi module that connects to the kervi application in robot.py. You can run it on the robot itself or another computer on your local network.
if __name__ == '__main__':
from kervi.module import Module
from kervi.actions import action, Actions
module = Module()
@action
def module_main():
#move for 5 seconds at 100% speed
Actions["steering.move"](100, duration=5)
#turn right at 50% speed
Actions["steering.rotate"](50, degree=90)
module.run()