Camera and video¶
Cameras are managed via special Kervi Camera controllers and Kervi camera device drivers. A camera device driver capture frames from a camera and feeds them into the camera controller.
The snippet below shows how to create a camera stream server and link it to a dashboard.
from kervi.vision.camera import CameraStreamer
from kervi_devices.motors.PCA9685_i2c_servo import PCA9685ServoBoard
#Create a streaming camera server
CAM1 = CameraStreamer("cam1", "camera 1")
CAM1.flip_vertical = True
CAM1.flip_horizontal = True
#link camera as background
CAM1.link_to_dashboard("app")
#link camera to a panel
CAM1.link_to_dashboard("system", "cam")
Size
It is possible to pass values for size and frames per second when you create the camera.
from kervi.vision.camera import CameraStreamer
CAMERA = CameraStreamer("cam1", "camera 1", size=1024, width=800, fps=30)
Source
In the examples above the camera source is not specified and Kervi looks for the default camera. On a Raspberry Pi it will be the on board camera. If you want to use another camera source than the default, you need to specify it.
from kervi.vision.camera import CameraStreamer
CAMERA = CameraStreamer("cam1", "camera 1", camera_source="/dev/video0")
Pan and tilt
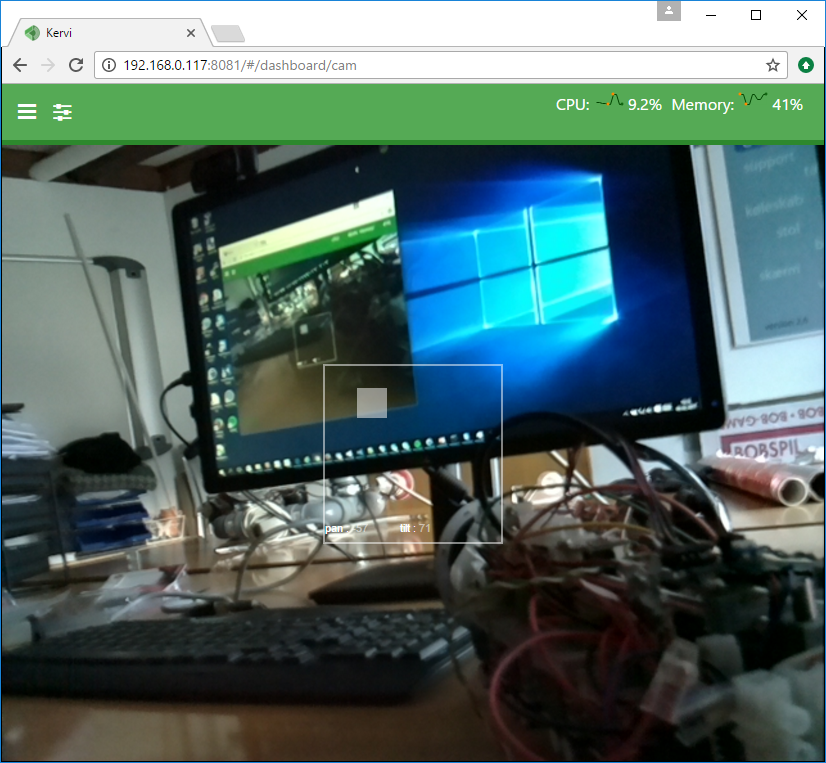
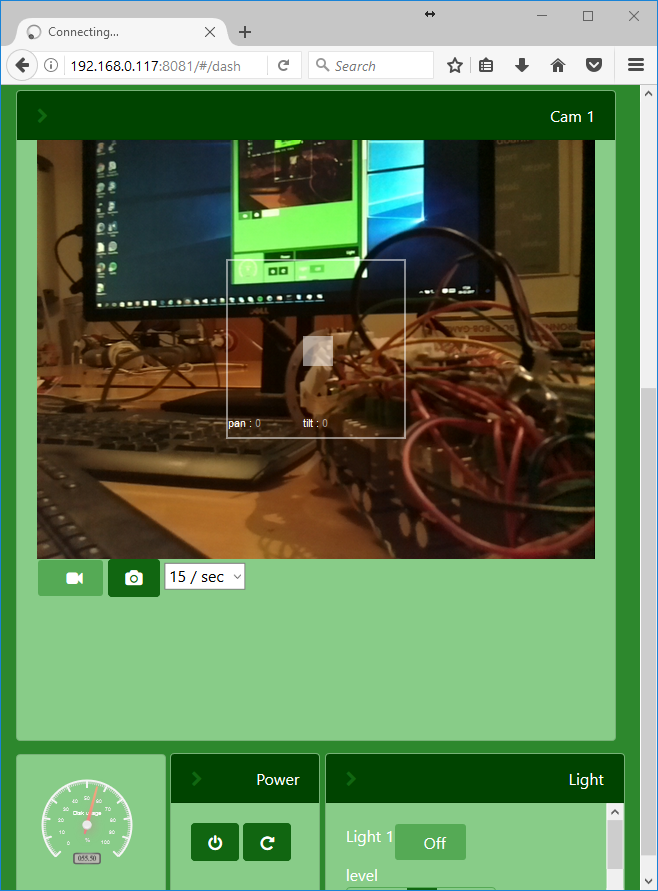
The cam viewer in the dashboards have a pan/tilt area at the center of the image. If you have rigged up the camera with pan and tilt servos you can connect the servos with the pan/tilt area by using the following code.
import datetime
from kervi.vision.camera import CameraStreamer
from kervi_devices.motors.PCA9685_i2c_servo import PCA9685ServoBoard
#Create a streaming camera server
CAM1 = CameraStreamer("cam1", "camera 1")
CAM1.flip_vertical = True
CAM1.flip_horizontal = True
#link camera as background
CAM1.link_to_dashboard("app")
#link camera to a panel
CAM1.link_to_dashboard("system", "cam")
#link pan and tilt to servos
motor_board = PCA9685ServoBoard()
motor_board.servo_motors[0].position.link_to(CAM1.pan)
motor_board.servo_motors[1].position.link_to(CAM1.tilt)